Posted 21 Apr

The Hooded Lycrabot (Flore pneumaticae) is a synthetic organism that can detect heat from living things. We have been cultivating them here at MOD. for quite a while, and since it is World Creativity and Innovation Day, we decided it was as good a time as any to release them on an unsuspecting public.

The exhibit, Pneumatic Blooms, is part of our 2021 exhibition on complex systems called It’s Complicated, and is inspired by cutting-edge soft robotic research and development from leading technology institutes such as Harvard Biodesign Lab and Whitesides Research Group.
The interest in soft robots, fondly referred to at MOD. as ‘squishies’, began before our museum opened. Staff were keen to submit their own weird and wonderful versions of what these squishies might look like.
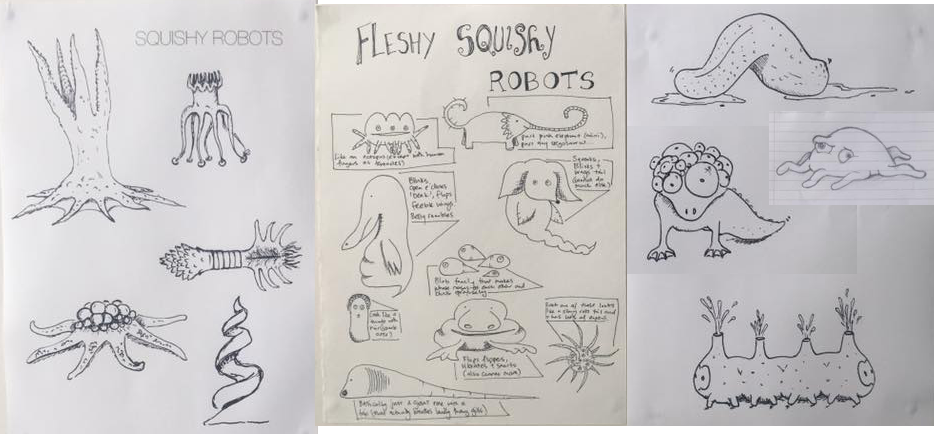
Apart from looking cute (or creepy, depending on your disposition), soft robotics involves a number of STEM-relevant fields such as mechanical and electrical engineering, physics, and biomimicry. This subfield of robotics has the potential to advance development in areas such as medical surgery, patient rehabilitation and biomimicry here on earth and potentially on other planets.
Our early prototypes were inspired by recent innovations in soft robotics and involved silicone actuators (tentacles) controlled by small air pumps and electrical circuits.
The desire to create more squishies (one can never have enough) that were time and cost effective to produce and would last longer because of fewer moving parts, led to the creation of tentacles based on actuators developed by the Biodesign lab at Harvard University. And so was born the Lycrabot.

Inspired by organisms like octopus stinkhorn fungus and vampire squid, Lycrabots mostly consist of latex “balloons” covered with fabric.
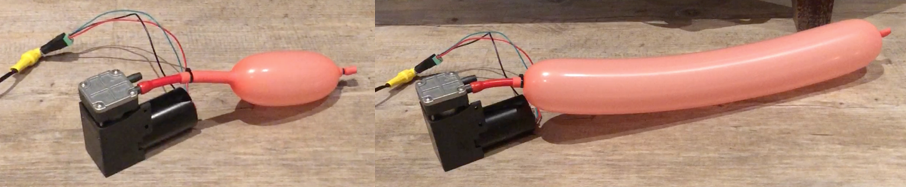
The fabric pockets are stretchy on one side (pink spandex/lycra) and non-stretchy on the other (scaly vinyl polyester) so when the balloon inflates, the lycra gives way and the vinyl doesn’t, causing the tentacle to bend. Lycrabots inflate when an infrared sensor detects thermal radiation from anything living, e.g., a visitor entering the Terrace to enjoy a relaxing lunch.
In complex systems, feedback is a process in which the outputs of a complex system are circled back and used as inputs.
Pneumatic Blooms involves sensors and electric and pneumatic circuits to create physical positive and negative feedback loops, but feedback may also occur behaviourally. For example, a visitor in one part of the Terrace can cause a certain Lycrabot to react, and that activity may prompt the visitor to move to another location, in turn activating a different Lycrabot and so on.
Pneumatic Blooms will run for the rest of It’s Complicated.